CGYRO
Brief description
CGYRO is a global-spectral gyrokinetic code.
Core developers
Emily Belli, General Atomics
Jeff Candy, General Atomics
Klaus Hallatschek, IPP
Igor Sfiligoi, SDSC
Notable publications
Title |
Link |
|---|---|
A high-accuracy Eulerian gyrokinetic solver for collisional plasmas |
[CBB16] |
Implications of advanced collision operators for gyrokinetic simulation |
[BC17] |
Spectral treatment of gyrokinetic shear flow |
[CB18] |
Spectral treatment of gyrokinetic profile curvature |
[CBS20] |
Paradigm for global gyrokinetic turbulence |
[CDB25] |
Title |
Link |
|---|---|
Multiscale-optimized plasma turbulence simulation on petascale architechtures |
[CSB+19] |
Comparing single-node and multi-node performance of an important fusion HPC code benchmark |
|
Optimization and portability of a fusion OpenACC-based HPC code from NVIDIA to AMD GPUs |
[SBCB23] |
GitHub source repository
Released under Apache2 license:
$ git clone git@github.com:gafusion/gacode.git
Input parameters
Normalization
Quantity |
Unit |
Description |
|---|---|---|
length |
\(a\) |
minor radius |
mass |
\(m_\mathrm{D}\) |
deuterium mass = \(3.345\times 10^{24} g\) |
density |
\(n_e\) |
electron density |
temperature |
\(T_e\) |
electron temperature |
velocity |
\(c_s = \sqrt{T_e/m_\mathrm{D}}\) |
deuterium sound speed |
time |
\(a/c_s\) |
minor radius over sound speed |
Tabular list
input.cgyro parameter |
Short description |
Default |
|---|---|---|
Geometry model selector |
2 |
|
Normalized minor radius |
0.5 |
|
Normalized major radius |
3.0 |
|
Shafranov shift |
0.0 |
|
Elongation |
1.0 |
|
Elongation shear |
0.0 |
|
Triangularity |
0.0 |
|
Triangularity shear |
0.0 |
|
Squareness |
0.0 |
|
Squareness shear |
0.0 |
|
Elevation |
0.0 |
|
Gradient of elevation |
0.0 |
|
Safety factor |
2.0 |
|
Magnetic shear |
1.0 |
|
Field orientation |
-1.0 |
|
Current orientation |
-1.0 |
|
Enforce up-down symmetry |
1 |
input.cgyro parameter |
Short description |
Default |
|---|---|---|
Tilt |
0.0 |
|
Tilt shear |
0.0 |
|
Ovality |
0.0 |
|
Ovality shear |
0.0 |
|
2nd antisymmetric moment |
0.0 |
|
2nd antisymmetric moment shear |
0.0 |
|
3rd antisymmetric moment |
0.0 |
|
3rd antisymmetric moment shear |
0.0 |
|
3rd symmetric moment |
0.0 |
|
3rd symmetric moment shear |
0.0 |
input.cgyro parameter |
Short description |
Default |
|---|---|---|
Profile input selector |
1 |
|
Toggle quasineutrality |
1 |
|
Toggle nonlinear simulation |
0 |
|
Control zonal flow testing |
0 |
|
Toggle silent output |
0 |
|
Initial \(n>0\) amplitude |
0.1 |
|
Initial \(n=0\) amplitude |
0.0 |
input.cgyro parameter |
Short description |
Default |
|---|---|---|
Number of fields to evolve |
1 |
|
Electron beta |
0.0 |
|
Electron beta scaling parameter |
0.0 |
|
Pressure gradient scaling factor |
1.0 |
|
Debye length |
0.0 |
|
Debye length scaling factor |
0.0 |
input.cgyro parameter |
Short description |
Default |
|---|---|---|
Number of radial \(k_x^0\) wavenumbers |
4 |
|
Radial domain size |
1 |
|
Number of binormal \(k_y\) wavenumbers |
1 |
|
Binormal wavenumber or domain size |
0.3 |
|
Number of poloidal \(\theta\) gridpoints |
24 |
|
Number of pitch angle \(\xi\) gridpoints |
16 |
|
Number of energy \(u\) gridpoints |
8 |
|
Maximum energy |
8.0 |
|
Use FP64 or FP32 math for nonlinear term |
0 |
input.cgyro parameter |
Short description |
Default |
|---|---|---|
Radial spectral upwind scaling |
1.0 |
|
Poloidal upwind scaling |
1.0 |
|
Binormal spectral upwind scaling |
0.0 |
|
Radial spectral upwind order |
3 |
|
Poloidal upwind order |
3 |
|
Binormal spectral upwind order |
3 |
|
Use reduced precision communication |
0 |
input.cgyro parameter |
Short description |
Default |
|---|---|---|
Time integrator selection |
0 |
|
Time step |
0.01 |
|
Error tolerance |
1e-4 |
|
Simulation time |
1.0 |
|
Error tolerance for frequency |
0.001 |
|
Data output interval |
100 |
|
Restart data output interval |
10 |
input.cgyro parameter |
Short description |
Default |
|---|---|---|
Number of GK species (ions plus electrons) |
1 |
|
Species charge |
1 |
|
Species mass |
1.0 |
|
Species density |
1.0 |
|
Species temperature |
1.0 |
|
Species density gradient |
1.0 |
|
Species temperature gradient |
1.0 |
input.cgyro parameter |
Short description |
Default |
|---|---|---|
Electron-electron collision frequency |
0.1 |
|
Collision model selector |
4 |
|
Toggle self-consistent field update |
1 |
|
Toggle momentum conservation |
1 |
|
Toggle energy conservation |
1 |
|
Toggle energy diffusion |
1 |
|
Toggle so-called FLR term |
0 |
|
Reduce Sugama memory use |
0 |
input.cgyro parameter |
Short description |
Default |
|---|---|---|
Rotation model selector |
1 |
|
Dopper shearing rate (\(E \times B\) shear) |
0.0 |
|
Rotation shearing rate |
0.0 |
|
Rotation speed (Mach number) |
0.0 |
|
Doppler shearing rate scaling factor |
1.0 |
|
Rotation shearing rate scaling factor |
1.0 |
|
Rotation speed scaling factor |
1.0 |
input.cgyro parameter |
Short description |
Default |
|---|---|---|
Global output resolution |
4 |
|
Source rate |
15.0 |
input.cgyro parameter |
Short description |
Default |
|---|---|---|
Output of electromagnetic field components |
0 |
|
Output of density and energy moments |
0 |
|
Output of global flux profiles |
0 |
|
Output of distribution (single-mode only) |
0 |
input.cgyro parameter |
Short description |
Default |
|---|---|---|
How many toroidal harmonics per MPI process |
1 |
|
Use FP64 or FP32 constants for the cmat constants |
0 |
|
Use FP64 or FP32 math for nonlinear term |
0 |
|
Relative ordering of MPI ranks |
2 |
|
What internal velocity order to use |
1 |
|
Enable GPU offload when possible |
1 |
Profile data: input.gacode.
Output data
Files
It is not recommended to read these files directly. Rather, we encourage the use of the CGYRO python data interface.
Filename |
Short description |
|---|---|
out.cgyro.egrid |
Energy mesh and various weights |
out.cgyro.equilibrium |
Physics input data |
out.cgyro.grids |
Mesh dimensions and coordinates |
out.cgyro.hosts |
MPI ranks and hostnames |
out.cgyro.info |
Human-readable description of simulation |
out.cgyro.memory |
Memory usage statistics |
out.cgyro.mpi |
Recommendations for choosing MPI tasks and OMP threads |
out.cgyro.version |
Version information and timestamp for simulation |
bin.cgyro.geo |
GK equation coefficients versus \(\theta\) |
Filename |
Short description |
Switch |
|---|---|---|
out.cgyro.time |
Time and error vector |
|
out.cgyro.timing |
Kernel timer data |
|
bin.cgyro.freq |
Mode frequency vector |
|
bin.cgyro.kxky_phi |
\(\delta\phi(k_x^0,k_y,t)\) |
|
bin.cgyro.kxky_apar |
\(\delta A_\parallel(k_x^0,k_y,t)\) |
FIELD_PRINT_FLAG = 1 |
bin.cgyro.kxky_bpar |
\(\delta B_\parallel(k_x^0,k_y,t)\) |
FIELD_PRINT_FLAG = 1 |
bin.cgyro.kxky_n |
\(\delta n_a(k_x^0,k_y,t)\) |
|
bin.cgyro.kxky_e |
\(\delta E_a(k_x^0,k_y,t)\) |
|
bin.cgyro.kxky_v |
\(\delta v_a(k_x^0,k_y,t)\) |
|
bin.cgyro.ky_flux |
\(\Gamma_a, \Pi_a, Q_a\) versus \((k_y,t)\) |
|
bin.cgyro.ky_cflux |
\(\Gamma_a, \Pi_a, Q_a\) (half domain) versus \((k_y,t)\) |
Filename |
Short description |
|---|---|
out.cgyro.tag |
Restart tag file (contains time index and value) |
bin.cgyro.restart |
Binary restart file |
Normalization
Ion sound gyroradius
Ion sound speed
gyroBohm particle flux
gyroBohm momentum flux
gyroBohm energy flux
Python interface
It is suggested that users use the python interface to read CGYRO output data.
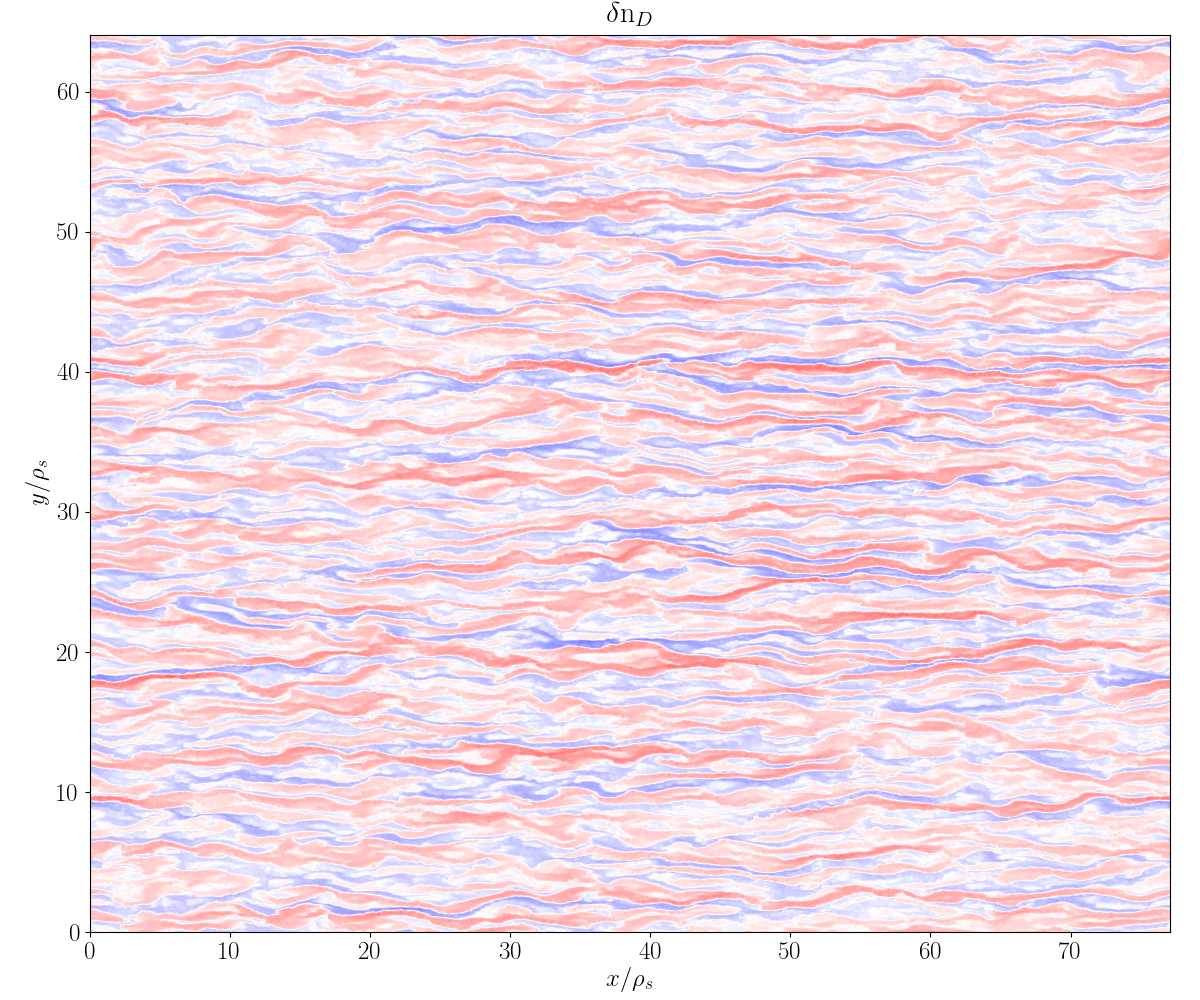
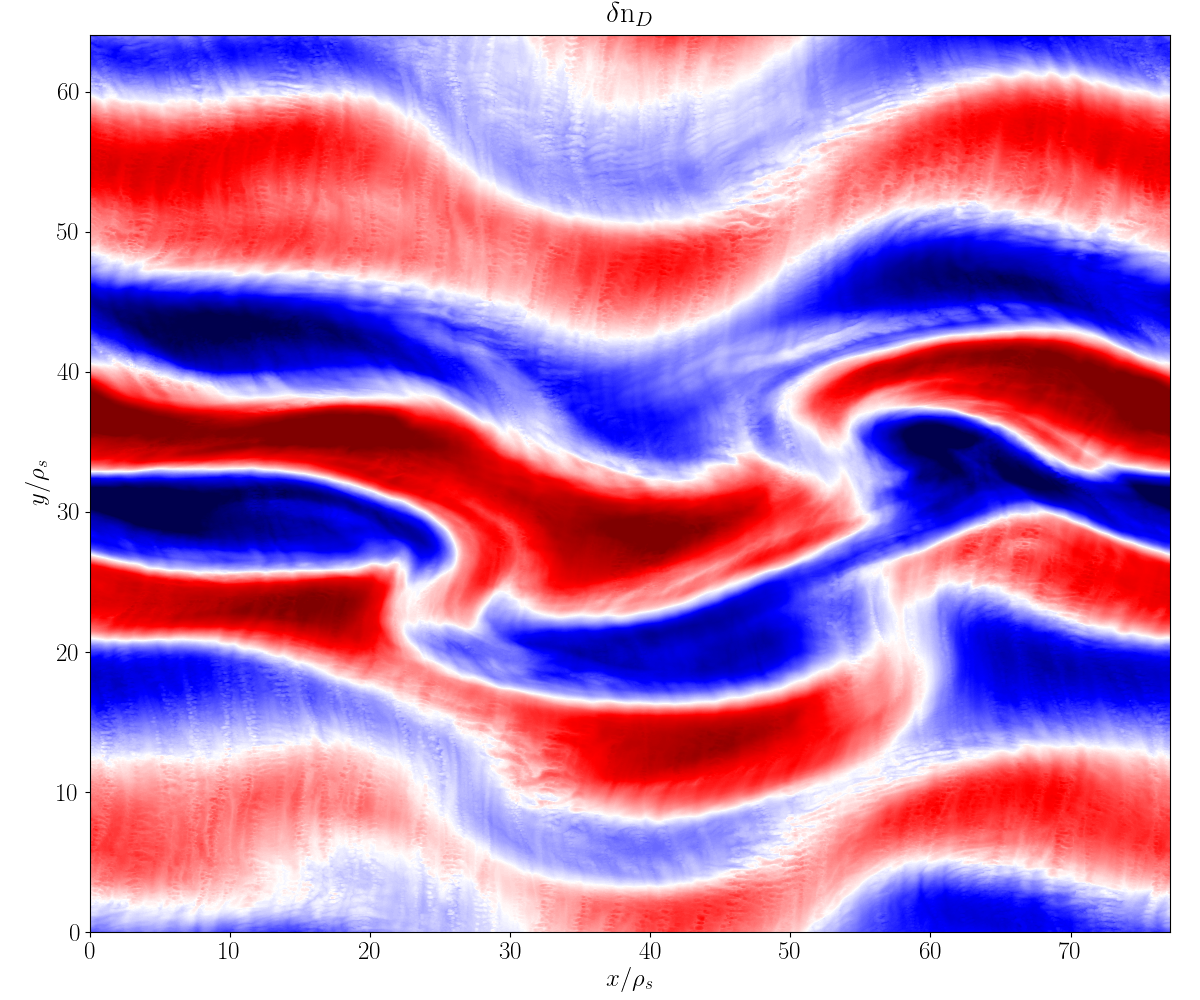
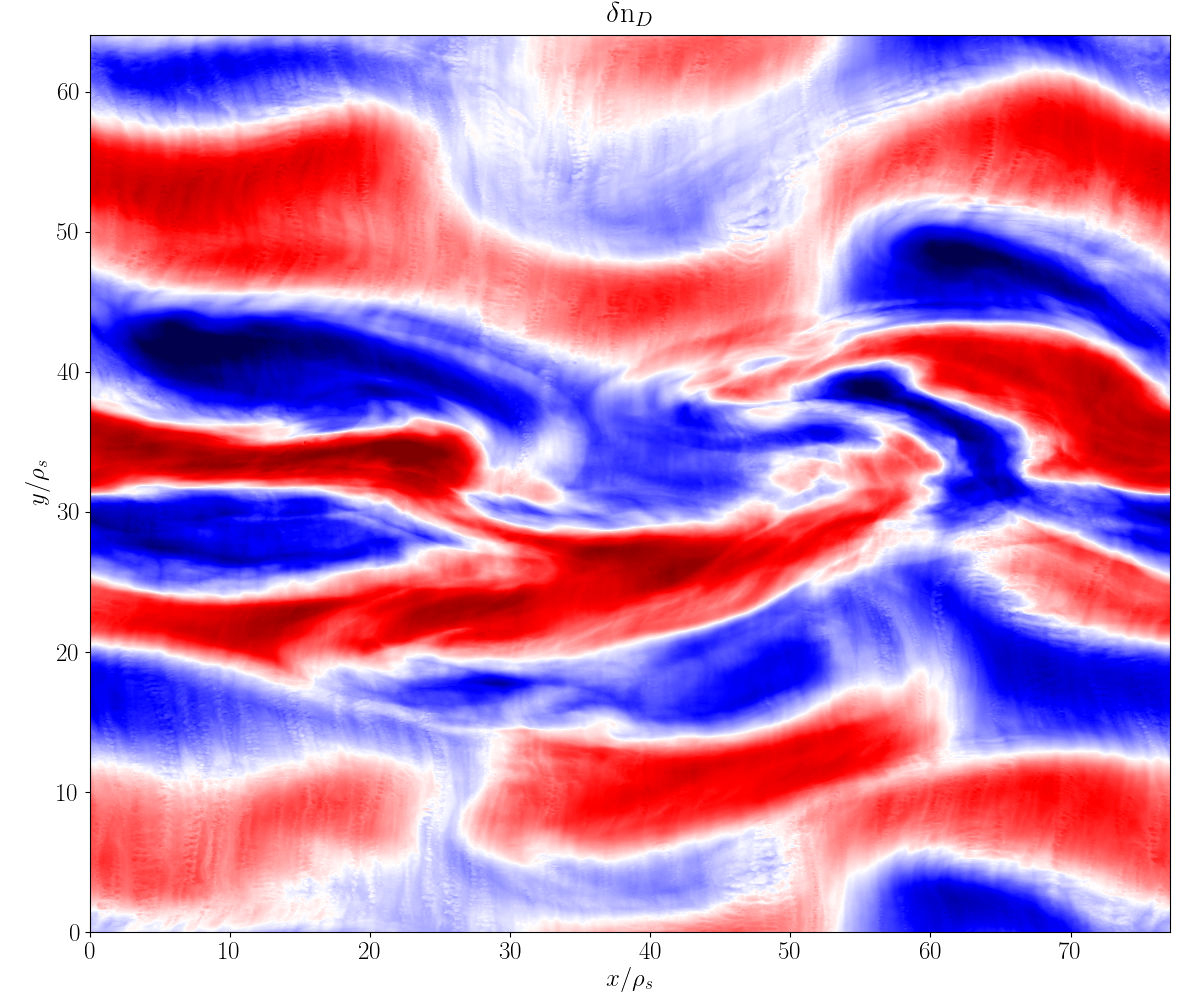
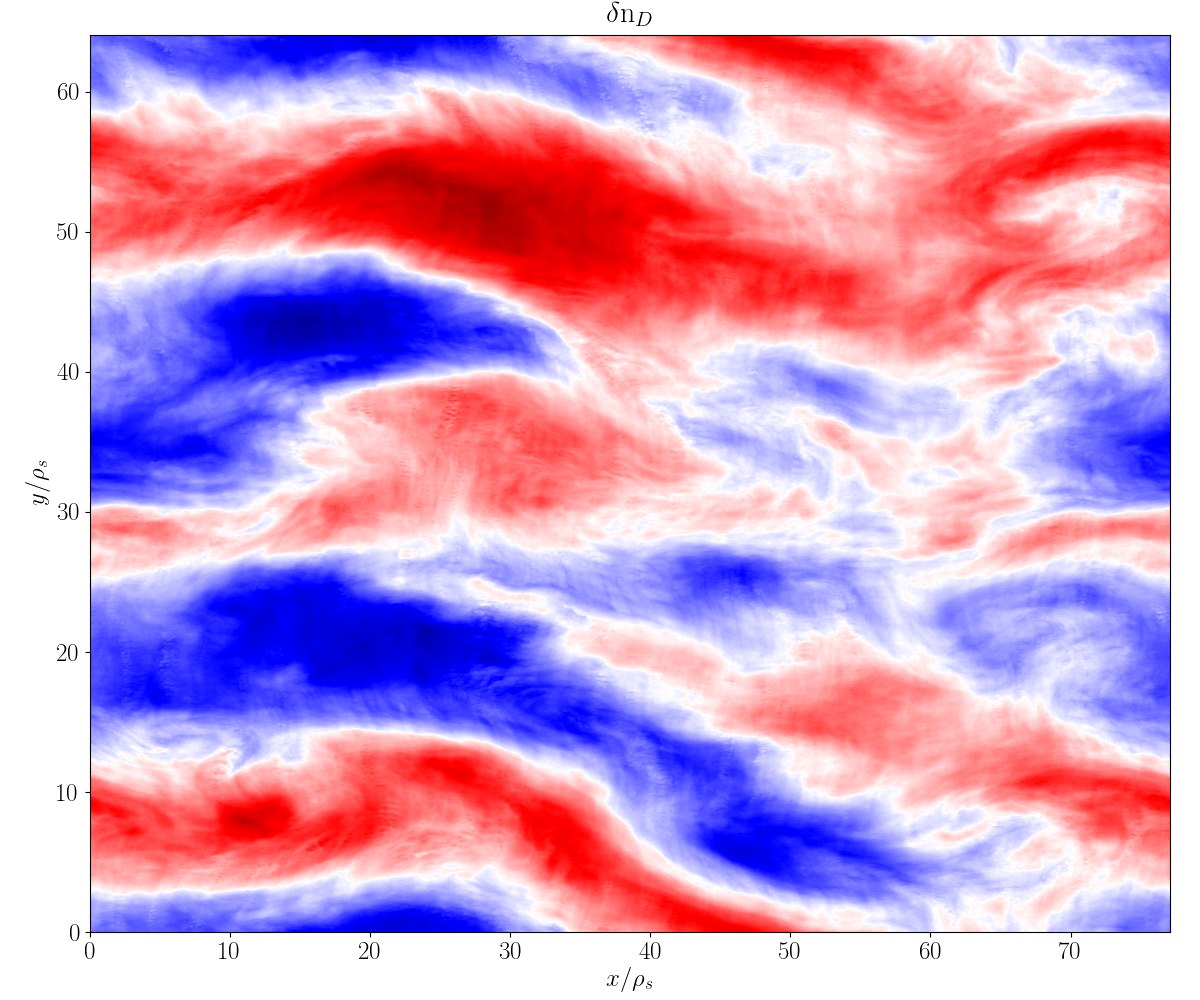
Simulation images
Simulation data courtesy Nathan Howard (MIT)
FAQ
What is \(k_y \rho_s\) and why does CGYRO modify \(\rho_s\) ?
The fundamental definition of the wavenumber and unit gyroradius are given in [CBB16]. These are
\[\begin{split}\begin{align} k_y \doteq &~nq/r \; , \\ \rho_s \doteq &~\rho_{s,\rm{unit}} = \frac{e B_\rm{unit}}{m_D c} \; , \\ B_\rm{unit} \doteq &~\displaystyle \frac{q}{r} \frac{\partial \psi}{\partial r} \; . \end{align}\end{split}\]Here, \(B_\rm{unit}\) is the Waltz effective magnetic field which is standard across all GACODE tools/codes, and \(r\) is the midplane minor radius. For a given value of \(k_y \rho_s\), the gyrokinetic equations are invariant to the scaling \(n \rightarrow \alpha n\) and \(\rho_s \rightarrow \rho_s/\alpha\), where \(\alpha\) is an arbitrary scaling parameter.
The CGYRO input parameter KY is
\[\mathtt{KY} \doteq \Delta(k_y \rho_s) = \Delta n \left(\frac{q}{r}\right) \rho_s \; .\]CGYRO enforces \(\Delta n = 1\), which sets the (artificial) value of \(\rho_s\) to
\[\rho_s \rightarrow \left(\frac{r}{q}\right) \mathtt{KY} \; .\]To see the physical values of key parameters, you can use profiles_gen:
$ profiles_gen -i input.gacode -loc_rad 0.6 INFO: (profiles_gen) input.gacode is autodetected as GACODE. INFO: (locpargen) Quasineutrality NOT enforced. INFO: (locpargen) rhos/a =+2.44577E-03 INFO: (locpargen) Te [keV] =+8.81550E-01 INFO: (locpargen) Ti [keV] =+7.58644E-01 INFO: (locpargen) Bunit =+2.92020E+00 INFO: (locpargen) beta_* =+4.84003E-03 INFO: -----> n=1: ky*rhos =-7.74754E-03 INFO: (locpargen) Wrote input.*.locpargen
How does adaptive time-stepping work?
Time-stepping is controlled with the parameter DELTA_T_METHOD. Setting the parameter to 0 gives the legacy fixed timestep, whereas values greater than 0 are adaptive methods. For the adaptive methods we recommend setting DELTA_T = 0.01. Here is the recommendation:
DELTA_T_METHOD=1 DELTA_T=0.01 PRINT_STEP=100The overall time-integration step is split between an explicit high-order step, and an implicit second-order step for collisions and trapping. When using the adaptive method, the value of DELTA_T is the size of the (large) implicit timestep. Then, the value of the explicit timestep is decreased to match the error tolerance, ERROR_TOL – the default value of which should be sufficient.
Why did you start over with CGYRO?
The past: GYRO
Over the past two decades, the fusion community has focused its modeling efforts primarily on the core region. A popular kinetic code used for this purpose was GYRO [CB10, CW03a, CW03b, CWD04]. Thousands of nonlinear simulations with GYRO have informed the fusion community’s understanding of core plasma turbulence [HHW+16, KWC05, KWC06, KWC07] and provided a transport database for the calibration of reduced transport models such as TGLF [SKW07]. GYRO was the first global electromagnetic solver, and pioneered the development of numerical algorithms for the GK equations with kinetic electrons. It is formulated in real space and like all global solvers requires ad hoc absorbing-layer boundary conditions when simulating cases with profile variation. This approach is suitable for core turbulence simulations, which cover a large radial region and are dominated by low wavenumbers.
The future: CGYRO
As the understanding of core transport has become increasingly complete, the cutting edge of research moved radially toward the pedestal region, where plasmas are characterized by larger collisionality and steeper pressure gradients that greatly modify the turbulent phenomena at play. This motivated the development, from scratch, of the CGYRO code [BC17, BC18, CBB16, CSB+19] to complement GYRO. CGYRO is an Eulerian GK solver specifically designed and optimized for collisional, electromagnetic, multiscale simulation. A key algorithmic aspect of CGYRO is the radially spectral formulation used to reduce the complicated integral gyroaveraging kernel into a multiplication in wavenumber space, but retaining the ability to treat profile variation important for edge plasmas [CB18, CBS20]. A new coordinate system that is more suitable for the highly collisional and shaped edge regime was adopted from the NEO code [BC08, BC12], which is the community standard for calculation of collisional transport in toroidal geometry.
How do you run a simple linear case?
$ cgyro -g reg08 $ cd reg08 $ cgyro -e . $ cgyro_plot -plot ball -field 1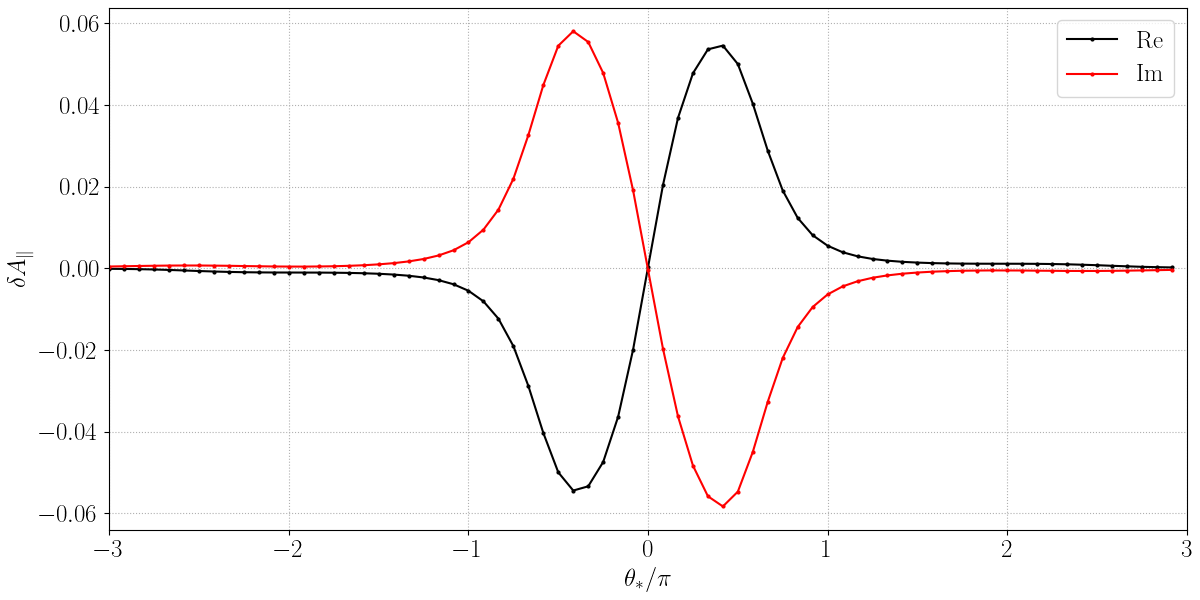
How do I run a pre-existing template case?
The input files and configuration for numerous linear and nonlinear cases can be auto-generated using the
-gflag. Often, it is easiest to find a template case that is close to what you would like to run, and then modify it accordingly. A list of all regression and template cases in generated by typing:$ cgyro -gA very simple nonlinear case is
nl00. You can generate the template with:$ cgyro -g nl00It is strongly suggested that you first run your case in test mode using the
-tflag:$ cgyro -t nl00On the large systems at NERSC, ORNL and elsewhere, you will need to establish an interactive queue to execute the command above. The result should be diagnostics printed to the screen plus a few output files. Pay attention to the file
out.cgyro.mpi. This shows the acceptable number of MPI tasks.
How do I submit a batch job?
On established platforms, the burden of writing batch script files and setting core counts is managed by the
gacode_qsubscript. To generate abatch.srcfile, you could type:$ gacode_qsub -e nl01 -n 512 -nomp 2 -queue regular -repo atom -w 0:09:00Additional flags are also accepted. Adding the
-sflag to the above will submit the job.